
Abstract
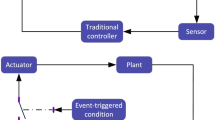
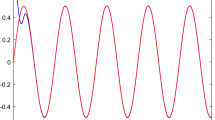
In this paper, the problem of event-triggered adaptive fuzzy tracking control for nonlinear systems with external disturbance is explored. The fuzzy logic system method is utilized to design the event-triggered adaptive controller under two different event-triggered mechanisms to ensure that the tracking error converges to zero in any small neighborhood, and all the signals in the closed loop systems are bounded. In addition, two different ways are given to prove that the Zeno phenomenon will not occur. Finally, two simulation examples are given to demonstrate the validity of the proposed control scheme.




Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Yu, J.P., Shi, P., Zhao, L.: Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 92, 173–180 (2018)
Jin, X.Z., Wang, S.F., Qin, J.H., Zheng, W.X., Kang, Y.: Adaptive fault-tolerant consensus for a class of uncertain nonlinear second-order multi-agent systems with circuit implementation. IEEE Trans. Circuits Syst. I Regul. Pap. 65(7), 2243–2255 (2018)
Li, Y.X.: Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica 106, 117–123 (2019)
Xia, J.W., Zhang, J., Feng, J.E., Wang, Z., Zhuang, G.M.: Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybern. Syst. (2019). https://doi.org/10.1109/TSMC.2019.2911115. (in press)
Sun, W., Su, S.F., Xia, J.W., Wu, Y.Q.: Adaptive tracking control of wheeled inverted pendulums with periodic disturbances. IEEE Trans. Cybern. 50(5), 1867–1876 (2020)
Sun, W., Su, S.F., Xia, J.W., Nguyen, V.T.: Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints. IEEE Trans. Syst. Man Cybern. Syst. 49, 2201–2209 (2019)
Sun, W., Su, S.F., Dong, G., Bai, W.: Reduced adaptive fuzzy tracking control for high-order stochastic nonstrict feedback nonlinear system with full-state constraints. IEEE Trans. Syst. Man Cybern. Syst. (2019). https://doi.org/10.1109/TSMC.2019.2898204. (in press)
Wu, W., Tong, S.C., Li, Y.M.: Fuzzy adaptive tracking control for switched nonlinear systems with full time-varying state constraints. Neurocomputing 352, 1–11 (2019)
Song, S., Zhang, B.Y., Song, X.N., Zhang, Z.Q.: Adaptive neuro-fuzzy backstepping dynamic surface control for uncertain fractional-order nonlinear systems. Neurocomputing 360, 172–184 (2019)
Chen, B., Liu, X.P., Liu, K.F., Lin, C.: Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 45(6), 1530–1535 (2009)
Chang, X.H., Yang, G.H.: Nonfragile \(H_\infty\) filtering of continuous-time fuzzy systems. IEEE Trans. Signal Process. 59(4), 1528–1538 (2011)
Chang, X.H., Yang, G.H.: Nonfragile \(H_\infty\) filter design for T-S fuzzy systems in standard form. IEEE Trans. Ind. Electron. 61(7), 3448–3458 (2014)
Huo, X., Ma, L., Zhao, X., Zong, G.D.: Observer-based fuzzy adaptive stabilization of uncertain switched stochastic nonlinear systems with input quantization. J. Franklin Inst. 356(4), 1789–1809 (2019)
Xia, J.W., Zhang, J., Sun, W., Zhang, B.Y., Wang, Z.: Finite-time adaptive fuzzy control for nonlinear systems with full state constraints. IEEE Trans. Syst. Man Cybern. Syst. 46(7), 1541–1548 (2019)
Tong, S.C., Sun, K.K., Sui, S.: Observer-based adaptive fuzzy decentralized optimal control design for strict feedback nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 26(2), 569–584 (2018)
Chang, X.H., Zhang, L., Park, J.H.: Robust static output feedback \(H_\infty\) control for uncertain fuzzy systems. Fuzzy Sets Syst. 273, 87–104 (2015)
Sun, W., Su, S.F., Wu, Y.Q., Xia, J.W., Nguyen, V.T.: Adaptive fuzzy control with high-order Barrier Lyapunov Functions for high-order uncertain nonlinear systems with full-state constraints. IEEE Trans. Cybern. (2019). https://doi.org/10.1109/TCYB.2018.2890256. (in press)
Sun, W., Xia, J.W., Zhuang, G.M., Huang, X., Shen, H.: Adaptive fuzzy asymptotically tracking control of full state constrained nonlinear system based on a novel Nussbaum-type function. J. Franklin Inst. 356(4), 1810–1827 (2018)
Xia, J.W., Chen, G.L., Park, J.H., Shen, H., Zhuang, G.M.: Dissipativity-Based sampled-data control for fuzzy switched Markovian jump systems. IEEE Trans. Fuzzy Syst. (2020). https://doi.org/10.1109/TFUZZ.2020.2970856. (in press)
Lu, K.X., Liu, Z., Lai, G.Y., Chen, C.L.P., Zhang, Y.: Adaptive fuzzy output feedback control for nonlinear systems based on event-triggered mechanism. Inf. Sci. 486, 419–433 (2019)
Tong, S.C., Li, Y.M., Sui, S.: Adaptive fuzzy tracking control design for SISO uncertain nonstrict feedback nonlinear systems. IEEE Trans. Fuzzy Syst. 24(6), 1441–1454 (2016)
Li, Y.M., Tong, S.C.: Fuzzy adaptive control design strategy of nonlinear switched large-scale systems. IEEE Trans. Syst. Man Cybern. Syst. 48(12), 2209–2218 (2018)
He, W., Kong, L.H., Dong, Y.T., Yu, Y., Yang, C.G., Sun, C.Y.: Fuzzy tracking control for a class of uncertain MIMO nonlinear systems with state constraints. IEEE Trans. Syst. Man Cybern. Syst. 49(3), 543–554 (2017)
Jer, C.W., Yu, Q.H., Chieh, K.C.: Sliding mode fuzzy control for nonlinear stochastic systems subject to pole assignment and variance constraint. Inf. Sci. 432, 133–145 (2018)
Liang, X.Y., Xia, J.W., Chen, G.L., Zhang, H.S., Wang, Z.: Dissipativity-based sampled-data control for fuzzy Markovian jump systems. Appl. Math. Comput. 361, 552–564 (2019)
Bai, W.W., Li, T.S., Tong, S.C.: NN reinforcement learning adaptive control for a class of nonstrict-feedback discrete-time systems. IEEE Trans. Cybern. (2020). https://doi.org/10.1109/TCYB.2020.2963849. (in press)
Bai, W.W., Zhou, Q., Li, T.S., Li, H.Y.: Adaptive reinforcement learning neural network control for uncertain nonlinear system with input saturation. IEEE Trans. Cybern. (2019). https://doi.org/10.1109/TCYB.2019.2921057. (in press)
Tabuada, P.: Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 52(9), 1680–1685 (2007)
Liu, T.F., Jiang, Z.P.: A small-gain approach to robust event-triggered control of nonlinear systems. IEEE Trans. Autom. Control 60(8), 2072–2085 (2015)
Postoyan, R., Tabuada, P., Nesic, D., Anta, A.: A framework for the event-triggered stabilization of nonlinear systems. IEEE Trans. Autom. Control 60(4), 982–996 (2015)
Yan, S., Shen, M.Q., Zhang, G.M., Nguang, S.K.: Reliable \(H_\infty\) output control of nonlinear systems with dynamic event-triggered scheme. J. Franklin Inst. 356(1), 58–79 (2019)
Anta, A., Tabuada, P.: To sample or not to sample: self-triggered control for nonlinear systems. IEEE Trans. Autom. Control 55(9), 2030–2042 (2010)
Liu, W., Huang, J.: Event-triggered global robust output regulation for a class of nonlinear systems. IEEE Trans. Autom. Control 62(11), 5923–5930 (2017)
Xing, L.T., Wen, C.Y., Liu, Z.T., Su, H.Y., Cai, J.P.: Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control 62(4), 2071–2076 (2017)
Xing, L.T., Wen, C.Y., Liu, Z.T., Su, H.Y., Cai, J.P.: Adaptive compensation for actuator failures with event-triggered input. Automatica 85, 129–136 (2017)
Wang, A.Q., Liu, L., Qiu, J.B., Feng, G.: Event-triggered robust adaptive fuzzy control for a class of nonlinear systems. IEEE Trans. Fuzzy Syst. 27(8), 1648–1658 (2019)
Huang, Y.X., Liu, Y.G.: Practical tracking via adaptive event-triggered feedback for uncertain nonlinear systems. IEEE Trans. Autom. Control 64(9), 3920–3927 (2019)
Ma, H., Li, H.Y., Liang, H.J., Dong, G.W.: Adaptive fuzzy event-triggered control for a stochastic nonlinear systems with full state constraints and actuator faults. IEEE Trans. Fuzzy Syst. 27(11), 2242–2254 (2019)
Zhang, C.H., Yang, G.H.: Event-triggered global finite-time control for a class of uncertain nonlinear systems. IEEE Trans. Autom. Control 65(3), 1340–1347 (2020)
Wang, L.X., Mendel, J.M.: Fuzzy basis functions, universal approximation, and orthogonal least squares learning. IEEE Trans. Neural Netw. 3(5), 807–814 (1992)
Lee, T.H., Wu, Z.G., Ju, H.P.: Synchronization of a complex dynamical network with coupling time-varying delays via sampled-data control. Appl. Math. Comput. 219(3), 1354–1366 (2012)
Yue, D., Tian, E.G., Han, Q.L.: A delay system method for designing event-triggered controllers of networked control systems. IEEE Trans. Autom. Control 58(2), 475–481 (2012)
Li, Z.C., Bai, Y., Li, T.Q.: Improved stability and stabilization design for networked control systems using new quadruple-integral functionals. ISA Trans. 63, 170–181 (2016)
Chen, B., Liu, X.P., Lin, C.: Observer and adaptive fuzzy control design for nonlinear strict-feedback systems with unknown virtual control coefficients. IEEE Trans. Fuzzy Syst. 26(3), 1732–1743 (2018)
Choi, J., Farrell, J.A.: Adaptive observer backstepping control using neural networks. IEEE Trans. Neural Netw. 12(5), 1103–1112 (2001)
Zhou, Q., Shi, P., Xu, S.Y., Li, H.Y.: Observer-based adaptive neural network control for nonlinear stochastic systems with time delay. IEEE Trans. Neural Netw. 24(1), 71–80 (2013)
Huang, J.S., Wang, W., Wen, C.Y., Zhou, J.: Adaptive control of a class of strict-feedback time-varying nonlinear systems with unknown control coefficients. Automatica 93, 98–105 (2018)
Peng, J.M., Li, C.Y., Ye, X.D.: Cooperative control of high-order nonlinear systems with unknown control directions. Syst. Control Lett. 113, 101–108 (2018)
Funding
Funding was provided by National Natural Science Foundation of China (Grant No. 61973148).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, B., Xia, J., Zhang, H. et al. Event-Triggered Adaptive Fuzzy Tracking Control for Nonlinear Systems. Int. J. Fuzzy Syst. 22, 1389–1399 (2020). https://doi.org/10.1007/s40815-020-00872-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-020-00872-3