
Abstract
In the last years the Italian Aerospace Research Center (CIRA) designed many versions of on-board payload management software for Unmanned Aerial Vehicles (UAVs), to be used in ISTAR (Intelligence, Surveillance, Target Acquisition and Reconnaissance) missions. A typical required function in these software suites is detection and tracking of moving ground vehicles.
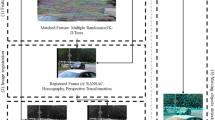
In this work, we propose a detection and tracking approach to moving objects that is suitable when the background is static in the real world and appears to be affected of global motion in the image plane. Each object is described as a set of SURF points enhanced with a related appearance model. Experiments on real world video sequences confirm the effectiveness of the proposed approach.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others


Notes
- 1.
Data can be downloaded at http://vision.cse.psu.edu/data/vividEval.
References
Garibotto, G., et al.: White paper on industrial applications of computer vision and pattern recognition. In: Petrosino, A. (ed.) ICIAP 2013. LNCS, vol. 8157, pp. 721–730. Springer, Heidelberg (2013). doi:10.1007/978-3-642-41184-7_73
EARTO: The TRL scale as a research & innovation policy tool, April 2014. http://www.earto.eu/fileadmin/content/03_Publications/The_TRL_Scale_as_a_R_I_Policy_Tool_-_EARTO_Recommendations_-_Final.pdf
Angelino, C.V., Baraniello, V.R., Cicala, L.: High altitude UAV navigation using IMU, GPS and camera. In: Proceedings of the 16th International Conference onInformation Fusion (FUSION), Istanbul, Turkey, pp. 647–654, July 2013
Cicala, L., Angelino, C.V., Raimondo, N., Baccaglini, E., Gavelli, M.: An H.264 sensor aided encoder for aerial video sequences with in-the-loop metadata enhancement. In: Battiato, S., Blanc-Talon, J., Gallo, G., Philips, W., Popescu, D., Scheunders, P. (eds.) ACIVS 2015. LNCS, vol. 9386, pp. 853–863. Springer, Heidelberg (2015). doi:10.1007/978-3-319-25903-1_73
Irvine, J.M.: National imagery interpretability rating scales (NIIRS): overview and methodology. In: Optical Science, Engineering and Instrumentation 1997. International Society for Optics and Photonics, pp. 93–103 (1997)
Rafi, F., Khan, S., Shafiq, K., Shah, M.: Autonomous target following by unmanned aerial vehicles. In: Defense and Security Symposium. International Society for Optics and Photonics, p. 623010 (2006)
Shaferman, V., Shima, T.: Unmanned aerial vehicles cooperative tracking of moving ground target in urban environments. J. Guidance Control Dyn. 31(5), 1360–1371 (2008)
Symington, A., Waharte, S., Julier, S., Trigoni, N.: Multi target tracking on aerial videos. In: ISPRS Istanbul Workshop 2010 on Modeling of Optical Airborne and Spaceborne Sensors, Istambul, Turkey, October 2010
Gelertm, M., Csaba, B., Tamas, S.: Probabilistic target detection by camera-equipped UAVs. In: IEEE International Conference on Robotics and Automation, Anchorage, Alaska, USA, October 2010
Rodríguez-Canosa, G., Thomas, S., del Cerro, J., Barrientos, A., MacDonald, B.: A real-time method to detect and track moving objects (DATMO) from unmanned aerial vehicles (UAVs) using a single camera. Remote Sens. 4(4), 1090–1111 (2012)
Breckon, T.P., Barnes, S.E., Eichner, M.L., Wahren, K.: Autonomous real-time vehicle detection from a medium-level UAV. In: Proceedings of the 24th International Conference on Unmanned Air Vehicle Systems, p. 29:1–29:9 (2009)
Hartley, R.I., Zisserman, A.: Multiple View Geometry in Computer Vision, 2nd edn. Cambridge University Press, Cambridge (2004). ISBN: 0521540518
Bay, H., Tuytelaars, T., Gool, L.: SURF: speeded up robust features. In: Leonardis, A., Bischof, H., Pinz, A. (eds.) ECCV 2006. LNCS, vol. 3951, pp. 404–417. Springer, Heidelberg (2006). doi:10.1007/11744023_32
Muja, M., Lowe, D.G.: Fast approximate nearest neighbors with automatic algorithm configuration. VISApp (1) 2(331–340), 2 (2009)
Fischler, M.A., Bolles, R.C.: Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 24(6), 381–395 (1981)
Cootes, T.F., Edwards, G.J., Taylor, C.J.: Active appearance models. IEEE Trans. Pattern Anal. Mach. Intell. 6, 681–685 (2001)
Laboratory of Perception Action and Cognition of the Penn State Univesity: vivid video dataset and tracker testbed program (2005). http://vision.cse.psu.edu/data/vividEval/
Collins, R., Zhou, X., Teh, S.K.: An open source tracking testbed and evaluation web site. In: IEEE International Workshop on Performance Evaluation of Tracking and Surveillance (PETS), January 2005
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing AG
About this paper
Cite this paper
Tufano, F., Angelino, C.V., Cicala, L. (2016). Visual Target Detection and Tracking in UAV EO/IR Videos by Moving Background Subtraction. In: Blanc-Talon, J., Distante, C., Philips, W., Popescu, D., Scheunders, P. (eds) Advanced Concepts for Intelligent Vision Systems. ACIVS 2016. Lecture Notes in Computer Science(), vol 10016. Springer, Cham. https://doi.org/10.1007/978-3-319-48680-2_48
Download citation
DOI: https://doi.org/10.1007/978-3-319-48680-2_48
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-48679-6
Online ISBN: 978-3-319-48680-2
eBook Packages: Computer ScienceComputer Science (R0)