
An Ultrahigh Frequency Partial Discharge Signal De-Noising Method Based on a Generalized S-Transform and Module Time-Frequency Matrix

Abstract
:
1. Introduction
2. Algorithm of the Generalized S-Transform
3. De-Noising Method of Periodic Narrowband Noise
3.1. Simulated Signals
3.2. Calculation Method of Frequency and Amplitude
3.2.1. Sub-Matrix Maximum Module Value Method
- Step 1:
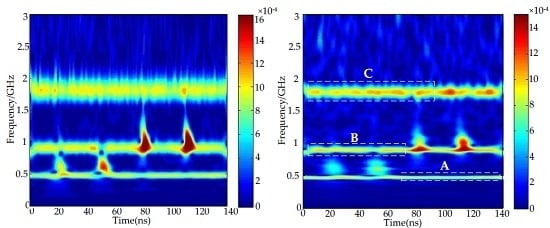
- As shown in Figure 2b, parts of the periodic narrowband noise are divided into Regions A, B, C, and the corresponding localized time-frequency sub-matrices are extracted;
- Step 2:
- Search the coordinate positions of the maximum module value points in each column of each sub-matrix;
- Step 3:
- Based on the MTFM calculated by the generalized S-transform (λ < 1), record the corresponding frequency values of the maximum module value points (f1, f2, f3, …, fn) and the calculated time of each frequency value (t1, t2, t3, …, tn);
- Step 4:
- Calculate the frequencies fp of each periodic narrowband noise based on Equation (10):
- Step 5:
- Record the module value of each sampling point (m1, m2, …, mn) in time on the calculated frequencies in Step (4), and calculate the module value mp of each corresponding narrowband noise in the MTFM based on Equation (11):
- Step 6:
- Calculate the amplitudes of periodic narrowband noise by utilizing the inverse generalized S-transform, and reconstruct time domain waveform based on Equation (3).
3.2.2. Selection of the Adjustable Factor λ
3.3. Method of Periodic Narrowband Noise Suppression
- Step 1:
- Use the generalized S-transform to obtain the MTFM SM×N and time-frequency distribution of noisy UHF PD signals, where SM×N is the matrix with M rows and N columns ;
- Step 2:
- Extract the localized matrices of periodic narrowband noise without PD signals based on the time-frequency distribution;
- Step 3:
- Obtain the amplitudes and frequencies of periodic narrowband noise utilizing the above-described SMMV method;
- Step 4:
- Use the generalized S-transform to calculate the MTFM P1, P2, …, Pn of periodic narrowband noise based on Equation (6) and the results of Step (3), where Pk is the matrix with M rows and N columns;
- Step 5:
- Suppress the periodic narrowband noise by utilizing the reverse phase cancellation method is given in Equation (13), where WM×N is the MTFM without periodic narrowband noise:
- Step 6:
- Use the inverse generalized S-transform to obtain the de-noised UHF PD signals in time domain of the WM×N.
4. De-Noising Method of Gaussian White Noise
4.1. Singular Value Decomposition De-Noising Method
- Step 1:
- For a signal sequence x(i), i = 1, 2, …, N, a trajectory matrix of x(i) is defined aswhere A∈Rm×n, 1 < n < N, and m = N – n + 1.
- Step 2:
- The SVD of this real matrix A∈Rm×n is defined as:where U and V are the orthogonal matrix, U∈Rm×n, V∈Rm×n. Λ = [diag(a1, a2, …, aq), O] or its transposition matrix, which is determined by m < n or m ≥ n. O is the zero matrix, q = min(m, n), a1 ≥ a2 ≥…≥ aq. ai, i = 1, 2, …, q, are the singular values of matrix.
- Step 3:
- In matrix Λ, the effective singular values corresponding to a PD signal are reserved while the corresponding white noise are set to zero, and thus a new matrix Λre can be obtained.
- Step 4:
- A new trajectory matrix Are is reconstructed by utilizing Λre, the original U and V through Equation (16), and the de-noised PD signals are recovered from the trajectory matrix Are:
4.2. Selection Method of Effective Singular Values
4.3. De-Noising Method of Gaussian White Noise
- Step 1:
- Calculate singular values of the MTFM of the noisy PD signals by SVD;
- Step 2:
- Calculate features of singular values sequence based on Equation (17);
- Step 3:
- Classify singular values into two groups utilizing FCM clustering algorithm, which represent UHF PD signals and Gaussian white noise, respectively;
- Step 4:
- Select the group whose maximum value is greater as the effective singular values, the number of effective singular values is defined as k in this paper;
- Step 5:
- Recover the de-noised PD signal by the conventional SVD de-noising method.
5. Simulation De-Noising Results and Discussions
- (1)
- The adaptive filtering method is capable of suppressing periodic narrowband noise. However, because the frequencies of narrowband noise and UHF PD signals are mixed, the de-noised PD signal waveforms are distorted.
- (2)
- Due to the large variation in time-frequency characteristics of UHF PD signals, de-noising results are affected by the mother wavelet selection [11]. In this paper, the de-noised signals with lower SNR and larger waveform distortion are obtained by utilizing Method C (select db2 wavelet); the de-noised signals with higher SNR and less waveform distortion are obtained by utilizing Method D (select db8 wavelet). Therefore, the de-noising effectiveness when using wavelet decomposition may become worse when an unsuitable mother wavelet is selected.
- (3)
- Because the effective singular values calculated from the MTFM represent more time-frequency-amplitude information, the proposed method in this paper is capable of obtaining the de-noised UHF PD signals with higher SNR and less waveform distortion compared with conventional SVD de-noising method.
- (4)
- Compared with four conventional de-noising methods, the proposed method based on the MTFM is capable of suppressing the periodic narrowband noise and Gaussian white noise successfully. Hence, by the proposed method, the de-noised UHF PD signals are similar to the original signals.
6. De-Noising Results of Field Detected Signals
7. Conclusions
- (1)
- To suppress periodic narrowband noise, the SMMV method based on generalized S-transform and MTFM is employed. By calculating the frequencies and amplitudes of the narrowband noise, the corresponding MTFMs are obtained and removed.
- (2)
- To suppress Gaussian white noise, singular values are calculated through decomposing the 2-dimensional MTFM based on the generalized S-transform. Effective singular values can be selected successfully by employing the FCM clustering method.
- (3)
- De-noising results of simulated and field detected UHF PD signals validate the feasibility of this method. Compared with some conventional de-noising methods, the proposed method obtains de-noised signals with high SNR and less waveform distortion.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| PD | Partial discharge |
| UHF | Ultrahigh frequency |
| HV | High voltage |
| WT | Wavelet transform |
| SNR | Signal noise ratio |
| MTFM | Module time-frequency matrix |
| FCM | Fuzzy c-means |
| SMMV | Sub-matrix maximum module value method |
| SVD | Singular value decomposition |
| PRPD | Phase resolved partial discharge |
| CPU | Central processing unit |
| RAM | Random access memory |
| RMSE | Root mean square error |
| NCC | Normalized correlation coefficient |
| VTP | Variation trend parameter |
| RVTP | Rise variation trend parameter |
| FVTP | Fall variation trend parameter |
| NRR | Noise reduction ratio |
| ARR | Amplitude reduction ratio |
References
- Álvarez, F.; Garnacho, F.; Ortego, J.; Sánchez-Urán, M.A. Application of HFCT and UHF sensors in on-line partial discharge measurements for insulation diagnosis of high voltage equipment. Sensors 2015, 15, 7360–7387. [Google Scholar] [CrossRef] [PubMed]
- Hou, H.; Sheng, G.; Jiang, X. Robust time delay estimation method for locating UHF signals of partial discharge in substation. IEEE Trans. Power Deliv. 2013, 28, 1960–1968. [Google Scholar]
- Hou, H.; Sheng, G.; Jiang, X. Localization algorithm for the PD source in substation based on L-shaped antenna array signal processing. IEEE Trans. Power Deliv. 2015, 30, 472–479. [Google Scholar] [CrossRef]
- Robles, G.; Sánchez-Fernández, M.; Albarracin-Sanchez, R.; Rojas-Moreno, M.V.; Rajo-Iglesias, E.; Martínez-Tarifa, J.M. Antenna parametrization for the detection of partial discharges. IEEE Trans. Instrum. Meas. 2013, 62, 932–941. [Google Scholar] [CrossRef]
- Robles, G.; Fresno, J.M.; Martínez-Tarifa, J.M. Separation of radio-frequency sources and localization of partial discharges in noisy environments. Sensors 2015, 15, 9882–9898. [Google Scholar] [CrossRef] [PubMed]
- Hou, H.; Sheng, G.; Li, S.; Jiang, X. A novel algorithm for separating multiple PD sources in a substation based on spectrum reconstruction of UHF signals. IEEE Trans. Power Deliv. 2015, 30, 809–817. [Google Scholar] [CrossRef]
- Sriram, S.; Nitin, S.; Prabhu, K.M.M.; Bastiaans, M.J. Signal denoising techniques for partial discharge measurements. IEEE Trans. Dielectr. Electr. Insul. 2005, 12, 1182–1191. [Google Scholar] [CrossRef]
- Luo, G.; Zhang, D.; Tseng, K.J.; He, J. Impulsive noise reduction for transient Earth voltage-based partial discharge using Wavelet-entropy. IET Sci. Meas. Technol. 2016, 10, 69–76. [Google Scholar] [CrossRef]
- Khan, S.Z.; Zhu, H.; Jin, X.; Tan, K. A new adaptive technique for on-line partial discharge monitoring. IEEE Trans. Dielectr. Electr. Insul. 1995, 2, 700–707. [Google Scholar] [CrossRef]
- Köpf, U.; Feser, K. Rejection of narrow-band noise and repetitive pulses in on-site PD measurements. IEEE Trans. Dielectr. Electr. Insul. 1995, 2, 433–446. [Google Scholar] [CrossRef]
- Satish, L.; Nazneen, B. Wavelet-based denoising of partial discharge signals buried in excessive noise and interference. IEEE Trans. Dielectr. Electr. Insul. 2003, 10, 354–367. [Google Scholar] [CrossRef]
- Ma, X.; Zhou, C.; Kemp, I.J. Interpretation of wavelet analysis and its application in partial discharge detection. IEEE Trans. Dielectr. Electr. Insul. 2002, 9, 446–457. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Zhou, C.; Kemp, I.J. Automated wavelet selection and thresholding for PD detection. IEEE Elect. Insul. Mag. 2002, 18, 37–45. [Google Scholar] [CrossRef]
- Xu, Z.; Tang, J.; Caixin, S. Application of complex wavelet transform to suppress white noise in GIS UHF PD signals. IEEE Trans. Power Deliv. 2007, 22, 1498–1504. [Google Scholar]
- Tang, Y.; Tai, C.; Su, C.; Chen, C.; Chen, J. A correlated empirical mode decomposition method for partial discharge signal denoising. Meas. Sci. Technol. 2010, 21, 085106. [Google Scholar] [CrossRef]
- Ashtiani, M.; Shahrtash, S. Feature-oriented de-noising of partial discharge signals employing mathematical morphology filters. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 2128–2136. [Google Scholar] [CrossRef]
- Ashtiani, M.; Shahrtash, S. Partial discharge de-noising employing adaptive singular value decomposition. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 775–782. [Google Scholar] [CrossRef]
- Zhao, X.; Ye, B. Selection of effective singular values using difference spectrum and its application to fault diagnosis of headstock. Mech. Syst. Signal Process. 2011, 25, 1617–1631. [Google Scholar] [CrossRef]
- Wang, K.; Liao, R.; Yang, L.; Li, J.; Grzybowski, S.; Hao, J. Optimal features selected by NSGA-II for partial discharge pulses separation based on time-frequency representation and matrix decomposition. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 825–838. [Google Scholar] [CrossRef]
- Wang, K.; Li, J.; Zhang, S.; Liao, R.; Wu, F.; Yang, L.; Li, J.; Grzybowski, S.; Yan, J. A hybrid algorithm based on s transform and affinity propagation clustering for separation of two simultaneously artificial partial discharge sources. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 1042–1060. [Google Scholar] [CrossRef]
- Stockwell, R.G.; Mansinha, L.; Lowe, R.P. Localization of the complex spectrum: The S transform. IEEE Trans. Signal Process. 1996, 44, 998–1001. [Google Scholar] [CrossRef]
- Dash, P.K.; Panigrahi, B.K.; Panda, G. Power quality analysis using S-transform. IEEE Trans. Power Deliv. 2003, 18, 406–411. [Google Scholar] [CrossRef]
- Huang, N.; Zhang, S.; Cai, G.; Xu, D. Power quality disturbances recognition based on a multiresolution generalized S-transform and a PSO-improved decision tree. Energies 2015, 8, 549–572. [Google Scholar] [CrossRef]
- Pinnegar, C.R.; Mansinha, L. The S-transform with windows of arbitrary and varying shape. Geophysics 2003, 68, 381–385. [Google Scholar] [CrossRef]
- Xiao, X.; Xu, F.; Yang, H. Short duration disturbance classifying based on S-transform maximum similarity. Int. J. Electr. Power 2009, 31, 374–378. [Google Scholar] [CrossRef]
- Li, B.; Zhang, P.; Liu, D.; Mi, S.; Ren, G.; Tian, H. Feature extraction for rolling element bearing fault diagnosis utilizing generalized S transform and two-dimensional non-negative matrix factorization. J. Sound Vib. 2011, 330, 2388–2399. [Google Scholar] [CrossRef]
- Sturm, C.; Wiesbeck, W. Waveform design and signal processing aspects for fusion of wireless communications and radar sensing. IEEE Proc. 2011, 99, 1236–1259. [Google Scholar] [CrossRef]
- Zhao, X.; Ye, B. Similarity of signal processing effect between Hankel matrix-based SVD and wavelet transform and its mechanism analysis. Mech. Syst. Signal Process. 2009, 23, 1062–1075. [Google Scholar] [CrossRef]
- Bezdek, J.C.; Ehrlich, R.; Full, W. FCM: The fuzzy c-means clustering algorithm. Comput. Geosci. UK 1984, 10, 191–203. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, J.; Li, N.; Wang, Y. Suppression of UHF partial discharge signals buried in white-noise interference based on block thresholding spatial correlation combinative de-noising method. IET Gener. Transm. Distrib. 2012, 6, 353–362. [Google Scholar] [CrossRef]
- Ardila-Rey, J.A.; Martinez-Tarifa, J.A.; Robles, G.; Rojas-Moreno, M.V. Partial discharge and noise separation by means of spectral-power clustering techniques. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 1436–1443. [Google Scholar] [CrossRef]
- Hussein, R.; Shaban, K.B.; El-Hag, A.H. Wavelet transform with histogram-based threshold estimation for online partial discharge signal denoising. IEEE Trans. Instrum. Meas. 2015, 64, 3601–3614. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PD Pulse Sequence | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| τ/ns | 0.5 | 1 | 0.5 | 1 |
| fc/MHz | 600 | 600 | 1000 | 1000 |
| A/mV | 10 | 40 | 10 | 40 |
| λ | Narrowband Noise #A | Narrowband Noise #B | Narrowband Noise #C | |||
|---|---|---|---|---|---|---|
| Frequency (MHz) | Amplitude (mV) | Frequency (MHz) | Amplitude (mV) | Frequency (MHz) | Amplitude (mV) | |
| 0.1 | 470.085 | 1.949 | 900.032 | 1.919 | 1800.194 | 1.842 |
| 0.2 | 470.085 | 1.954 | 900.011 | 1.925 | 1800.194 | 1.883 |
| 0.3 | 470.085 | 1.986 | 900.076 | 1.931 | 1800.894 | 1.912 |
| 0.4 | 470.312 | 1.984 | 899.391 | 1.933 | 1802.140 | 1.924 |
| 0.5 | 470.476 | 1.979 | 901.328 | 1.926 | 1802.954 | 1.927 |
| 0.6 | 470.851 | 1.974 | 898.398 | 1.915 | 1803.823 | 1.925 |
| 0.7 | 470.994 | 1.976 | 901.852 | 1.929 | 1804.974 | 1.916 |
| 0.8 | 471.265 | 1.968 | 902.347 | 1.924 | 1805.293 | 1.917 |
| 0.9 | 471.325 | 1.968 | 903.481 | 1.919 | 1806.905 | 1.913 |
| 1.0 | 471.785 | 1.962 | 903.911 | 1.918 | 1807.488 | 1.904 |
| 1.1 | 472.046 | 1.953 | 904.056 | 1.911 | 1809.226 | 1.901 |
| Method | Noise Type | Technique |
|---|---|---|
| A | Narrowband noise + White noise | Proposed method in this paper |
| B | Narrowband noise + White noise | Adaptive IIR filter |
| C | Narrowband noise + White noise | Adaptive threshold WT de-noising (db2) |
| D | Narrowband noise + White noise | Adaptive threshold WT de-noising (db8) |
| E | White noise | Conventional SVD de-noising method |
| Evaluation Parameter | De-Noising Method | Pulse 1 | Pulse 2 | Pulse 3 | Pulse 4 | All |
|---|---|---|---|---|---|---|
| SNR | Method A | 14.445 | 19.482 | 16.794 | 20.987 | 16.473 |
| Method B | 2.875 | 1.832 | 3.892 | 2.968 | 2.712 | |
| Method C | −0.871 | −0.362 | −1.796 | −1.704 | −1.647 | |
| Method D | 0.585 | 0.315 | 1.607 | 1.861 | 0.941 | |
| Method E | 6.2548 | 7.629 | 8.662 | 9.029 | 8.342 | |
| RMSE | Method A | 0.0013 | 8.3 × 10−4 | 7.6 × 10−4 | 3.7 × 10−4 | 3.4 × 10−4 |
| Method B | 0.0248 | 0.0418 | 0.0196 | 0.0327 | 0.0198 | |
| Method C | 0.0587 | 0.0697 | 0.0234 | 0.0212 | 0.0432 | |
| Method D | 0.0551 | 0.0497 | 0.0189 | 0.0212 | 0.0347 | |
| Method E | 0.0124 | 0.0133 | 0.0166 | 0.0390 | 0.0134 | |
| NCC | Method A | 0.9898 | 0.9942 | 0.9934 | 0.9970 | 0.9907 |
| Method B | 0.7416 | 0.6446 | 0.8118 | 0.7256 | 0.5773 | |
| Method C | 0.3503 | 0.4506 | 0.5122 | 0.5418 | 0.4301 | |
| Method D | 0.4152 | 0.5738 | 0.6577 | 0.7479 | 0.6209 | |
| Method E | 0.8832 | 0.9112 | 0.8035 | 0.5389 | 0.8251 | |
| VTP | Method A | 1.0745 | 1.0382 | 1.0260 | 1.0515 | 1.0476 |
| Method B | 0.7814 | 0.6767 | 0.7042 | 0.7237 | 0.7432 | |
| Method C | 1.7645 | 1.2887 | 1.8554 | 1.7592 | 1.6346 | |
| Method D | 1.1484 | 1.0606 | 1.4327 | 1.3084 | 1.2636 | |
| Method E | 1.0852 | 1.0790 | 0.7157 | 0.7880 | 0.8956 |
| Signal | Frequency (MHz) | Amplitude (mV) |
|---|---|---|
| UHF signal 1# | 875.9 | 1.03 |
| 941.1 | 2.16 | |
| UHF signal 2# | 876.4 | 3.53 |
| 961.3 | 1.24 |
| Signal | De-Noising Method | Evaluation Parameter | |
|---|---|---|---|
| NRR | ARR | ||
| PD Signal #1 | Method A | 15.96 | 21.4% |
| Method B | 10.59 | 34.6% | |
| Method C | 13.21 | 27.6% | |
| Method D | 13.36 | 41.3% | |
| PD Signal #2 | Method A | 19.23 | 32.5% |
| Method B | 17.25 | 48.3% | |
| Method C | 16.68 | 43.4% | |
| Method D | 17.66 | 36.6% | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhou, W.; Li, P.; Yang, S.; Tian, Y. An Ultrahigh Frequency Partial Discharge Signal De-Noising Method Based on a Generalized S-Transform and Module Time-Frequency Matrix. Sensors 2016, 16, 941. https://doi.org/10.3390/s16060941
Liu Y, Zhou W, Li P, Yang S, Tian Y. An Ultrahigh Frequency Partial Discharge Signal De-Noising Method Based on a Generalized S-Transform and Module Time-Frequency Matrix. Sensors. 2016; 16(6):941. https://doi.org/10.3390/s16060941
Chicago/Turabian StyleLiu, Yushun, Wenjun Zhou, Pengfei Li, Shuai Yang, and Yan Tian. 2016. "An Ultrahigh Frequency Partial Discharge Signal De-Noising Method Based on a Generalized S-Transform and Module Time-Frequency Matrix" Sensors 16, no. 6: 941. https://doi.org/10.3390/s16060941