1. Introduction
Vessel classification is of increasing interest to many fields, such as marine environmental monitoring, fishing law-enforcement, and maritime traffic monitoring. Synthetic aperture radar (SAR) is an active sensor that has a powerful surveillance capability, allowing for observations regardless of the weather conditions, time of day, or cooperation of the vessel. Furthermore, the available satellite SAR systems operating in L-, C- and X-band offer products with various swaths and spatial resolutions. Because of these characteristics and flexibility, SAR remote sensing is one of the most important technologies for vessel monitoring at sea.
For nearly thirty years, vessel detection has been popular in SAR applications. Much progress has been achieved in vessel detection using SAR technology [
1,
2]. Vessel detection can provide information on vessel positions. If a user wants to determine the vessel type, vessel classification is needed [
3,
4]. Compare with vessel detection, few studies have been conducted on vessel classification. The initial attempts at vessel classification were mainly based on inverse synthetic aperture radar (ISAR) vessel images [
5,
6,
7] and backscattering simulation images of vessels [
8,
9]. Recently, polarimetric SAR data have also been exploited for vessel classification [
10,
11]. In addition to using ISAR data and PolSAR data, some studies on single-polarization real SAR images, such as ENVISAT-ASAR and ERS images, have been conducted. In the project of detection and classification of marine traffic from space (DECLIMS), Greidanus
et al. demonstrated that output of vessel classification based on ERS-2, ENVISAT-ASAR Image and Alternate polarization modes, RADARSAT-1 Standard and Fine modes SAR images was only limited to size estimates [
12]. Margarit
et al. presented a vessel classification algorithm based on fuzzy logic. Experimental results based on the ENVISAT-ASAR and ERS data at a resolution of approximately 30 meters showed that the preliminary percentage of positive classifications was approximately 70% [
3,
13]. In medium resolution SAR images (30 to 10 m), energy scattered from different parts of a vessel usually overlap in a few pixels. No additional details on the vessel structure can be found. Thus, it is difficult to discriminate vessel types based on those images alone. For vessel classification, high-resolution images (10 to 3 m), in which details increase, are needed.
Fortunately, with the launch of advanced SAR satellites, such as COSMO-SkyMed, TerraSAR-X and Radarsat-2, whose image resolutions are as high as 3 m, it has become possible to observe more vessel structural features in SAR images and classify vessels. Knapskog
et al. [
14] analyzed characteristics of ships in TerraSAR-X and airborne SAR images, and proposed a vessel classification method. In their work, silhouettes of vessels extracted from steep incidence angle SAR images were compared with silhouettes of 3-D models to discriminate vessels with comparable sizes and shapes [
4]. Teutsch
et al. [
15] presented an approach for segmentation and classification of man-made objects in TerraSAR-X images. Chen Wen-ting
et al. [
16] proposed a novel two-stage feature selection approach for ship classification in TerraSAR-X images. Xing [
17] proposed a method based on the sparse representation in feature space for classification in TerraSAR-X images. Jiang [
18,
19] used structural features to classify civilian vessels in COSMO-SkyMed images. Zhang [
20] and Wang [
21] analyzed the scattering components of ships in COSMO-SkyMed images to represent the superstructure of different ship types, and classified ships into three types: bulk carriers, container ships and oil tankers.
Although the previous studies achieved encouraging results, vessel classification is still an issue. In high-resolution SAR images, vessels are detailed; the characteristics of an object are different from those in a medium resolution image. Therefore, the features and method should be improved for new data.
In this paper, we propose a merchant vessel classification methodology based on feature analysis in high-resolution SAR images. Bulk carriers, container ships and oil tankers are three types of mainstream merchant ships of the international shipping market. Therefore vessels in the SAR images are classified into those three categories.
Based on image characteristic analyses of the three types of vessels, the average value of kernel density estimation, three structural features, mean backscattering coefficient, local radar cross section density and the ratio of width and length are investigated for distinguishing the three classes of vessels. The selected features are input to the classifier. A support vector machine (SVM) classifier is used for the ship classification and is compared with the traditional methods, such as K-nearest neighbor algorithm (K-NN) [
22] and minimum distance classifier (MDC) [
22] to evaluate the classification results. Experiments are performed with 3 m COSMO-SkyMed stripmap HIMAGE mode products. Vessel information acquired from
in situ investigations and Automatic Identification System (AIS) reports is used as the ground truth for the analysis and evaluation.
The paper is organized as follows.
Section 2 provides the algorithm assumption for the vessel classification in the paper.
Section 3 describes the characteristics of bulk carriers, container ships, and oil tankers in high-resolution SAR images.
Section 4 introduces the data processing chain, including image preprocessing, scattering and structural features extraction and the classifier.
Section 5 presents the classification experiment results and analysis of the classification model selection, the feature analyses and a comparison with other methods. Finally, the conclusions are presented in
Section 6.
2. Algorithm Assumption
Based on the analyses of simulated polarimetric images, Margarit [
9] suggested that at steep incidence angles, e.g., 15°–35°, the scattering response of a vessel seems stable along a frequency and ship bearing. In this case, superstructures of a vessel are usually stretched out in high-resolution SAR images due to layover. Equation (1) expresses the relation among the layover
L in the slant range, the object height
H and the incidence angle of a radar wave
θ. According to (1), assuming that
H is known, the value of
L is shorter as
θ (0° <
θ < 90°) increases.
Figure 1 illustrates the imaging geometry of a vessel in a SAR image at different incidence angles.
θi (
i = 1,2) are the incidence angles of a radar wave.
H is the height of the vessel above the sea surface.
Li (
i = 1,2) are lengths of the layover in SAR image. Equation (1) and
Figure 1 show that steep incidence angle lead to considerable layover (
Figure 1b) for tall objects, such as the superstructure of a ship, while shallow incidence angle leads to small layover (
Figure 1a).
Figure 2 is an example of a container ship in a COSMO-SkyMed 3 m resolution SAR image at different incidence angles. According to the AIS information, the container ship named BELUGA has a length of 162 m and a width of 33 m.
Figure 2a is the
in situ photograph.
Figure 2b,c shows the same ship in the SAR images at 9:33 am and 10:21 am respectively, of the same day in 2010. According to the position of the ships in the image and the metadata of the image, the local incidence angles at the ship positions can be calculated. In this case, the incidence angle of
Figure 2b is approximately 59.0º and that of
Figure 2c is approximately 26.4°. We can see that considerable layover occurs in the steep incidence angle image. In this case, the silhouette of the vessel can be used as a feature for vessel classification [
4]. For a shallow incidence angle, the images show apparent top-view projections of the ships [
14], and the structures on the decks are relatively apparent. Scattering from the superstructure above the deck is significant. In a sense, the locations of the strong scatters are related physical structures of the vessel. Therefore, the features can be used for vessel classification.
Figure 1.
Layover of a vessel at different incidence angles. (a) is a shallow incidence angle; and (b) is a steep incidence angle.
Figure 1.
Layover of a vessel at different incidence angles. (a) is a shallow incidence angle; and (b) is a steep incidence angle.
Figure 2.
An example of a container ship in a SAR image at different incidence angles; (a) an in situ photo; (b) shallow incidence angle of 59.0°; and (c) steep incidence angle of 26.4°. (A is the azimuth direction, and R is the range direction).
Figure 2.
An example of a container ship in a SAR image at different incidence angles; (a) an in situ photo; (b) shallow incidence angle of 59.0°; and (c) steep incidence angle of 26.4°. (A is the azimuth direction, and R is the range direction).
It is known, the movement along the azimuth coordinate of a vessel usually leads to blurring in the SAR image. It is difficult to extract effective features from a smeared image for vessel classification. Therefore, for simplicity, only anchored vessels in the image are considered. In addition, small ships cannot show detail structures in the image, so the merchant ships over 150 m long are considered for the experiments.
Therefore, in this paper, we focus on moored and large vessel classification in high-resolution SAR images at shallow incidence angles according to the integrated features and present an improved processing chain.
3. Scattering Characteristics of Vessels in High-Resolution SAR Images
Dihedral or trihedral reflectors reflect most radar energy back to the sensor when they face the radar beam (
Figure 3). Therefore, the reflectors are usually bright in SAR image. Because of the dihedral reflections between the vessel hull and sea surface and trihedral reflections among the superstructures on the deck, vessels usually give strong backscattering in SAR image. The backscattering depends on several properties, such as the structure of the ship, the orientation of the ship relative to the sensor, the material, the motion, and the SAR system parameters [
20]. Generally, the flat deck and other slightly curved plates produce strong specular reflection when viewed at off-nadir directions, so very low backscattering is received by radar; these areas appear dark in the SAR image. However, the superstructure and the ancillary facilities, such as the funnel, deckhouse, arm of the crane, and goods (e.g., containers), which are usually composed of metal, form dihedral or trihedral reflectors and become the dominant scatterers in the images. Notably, the deckhouse usually has apparent sidelobes along the range and azimuth directions, because of the strong backscattering due to the dihedral or trihedral structure formed by the walls of the cabin and deck. In some situations the main-mast also shows strong backscattering in a SAR image [
9]. Moreover, a large dihedral reflector made up of the water surface and the hull side, which faces the radar, also has considerable backscattering that is seen as a bright line in SAR images. The locations of strong scatterers and weak backscattering regions in an image are usually related to the physical structures of the vessel. Bulk carriers, container ships and oil tankers have unique physical structure. Therefore, the distributions of backscattering in the SAR image are also different for the three categories of vessels.
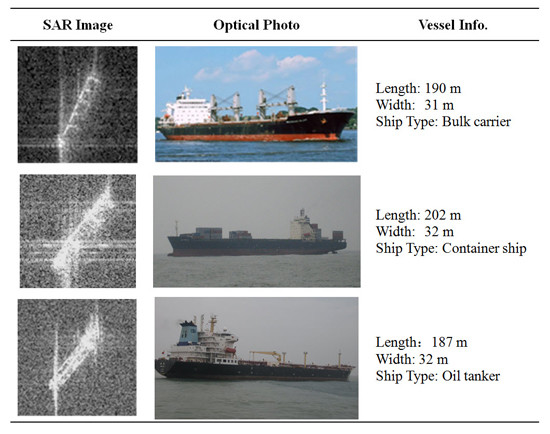
Table 1 demonstrates the three types of vessels. The SAR images are sub-scenes from 3 m resolution X-band COSMO-SkyMed stripmap HIMAGE images.
Figure 3.
Examples of a dihedral reflector (a); and a trihedral reflector (b).
Figure 3.
Examples of a dihedral reflector (a); and a trihedral reflector (b).
A bulk carrier usually has large box-like hatches on its deck. The hatched edges and the main deck form a dihedral reflector, which produces strong echo signals. However, the flat hatches often transmit specular reflection. As a result, bulk carriers show up as bright stripes with light and dark intervals. The bright stripes have the same width as the hatch, and they are perpendicular to the ship’s side. The side of the ship’s hull toward the incident direction has a clear boundary. The other hull side, in contrast, has a relatively weak echo (
Table 1, top).
For a container ship, the rectangular containers loaded on the deck, which are composed of metallic materials, have strong reflections because of the corner reflectors formed by them. So, the container ships transmit strong echoes overall. If the container is fully loaded, then the entire hull appears as a bright spot. If the containers are placed randomly, we can obtain irregularly strong echo signals. Compared with the bulk carriers, container ships have more intensive spots and the distribution of the strong scatterers in the SAR image is more irregular (
Table 1, middle).
Oil tankers have a flat deck. In the middle of the deck, there are oil pipelines from the stern to the bow. The facilities are usually symmetric along the oil pipeline. Generally, the pipeline and the facilities are composed of metallic materials that form a large number of dihedral and even trihedral reflectors. Thus, there is usually a distinct backscattering line in the middle of oil tankers (
Table 1, bottom).
Table 1.
Examples and optical photos of a bulk carrier, container ship and oil tanker in SAR image (the azimuth direction of the SAR image is from bottom to top, and the range direction of the SAR image is from left to right. The local incidence angles of the image from top to bottom are approximately 50.3°, 50.54°, and 50.53°, respectively).
4. Methodology
The flowchart of our method for classifying vessel types is shown in
Figure 4. First, radiometric calibration of the data is performed by the Next ESA SAR Toolbox (NEST) for the quantitative analysis. A feature based constant false alarm rate (CFAR) detector [
23] is employed to help us locate vessel candidates in the image. However, it is impossible for one method to detect all true vessels without any false alarms or errors. Therefore, the vessel candidates are refined by manually interpreting with AIS information after the vessel detection. Then, for improved vessel classification, the regions of interest, which are image sub-scenes that contain one vessel each, are extracted. The major work of the vessel classification in the paper is based on the well-identified and isolated chips. Before the classification, the chips undergo pre-processing, which includes side-lobe effect reduction and minimum enclosing rectangle (MER) extraction. The features are extracted from the vessel pixels in the MER to avoid negative effects from the sea backscattering for statistical analysis. Lastly, the vessels are classified into different categories based on the features.
Figure 4.
Flowchart of the vessel classification in a SAR image.
Figure 4.
Flowchart of the vessel classification in a SAR image.
4.1. Preprocessing
The band-limited characteristics of SAR systems together with the slight oversampling can cause that the contribution of a single target extends to more than a single cell. The point-spread function (PSF), which is basically a bi-dimensional
sinc, will present redundant information around the main lobe and visible side lobes when high-power scatterers are placed in areas with a limited coefficient of backscattering [
24]. Ships usually have strong backscattering due to their metallic materials and superstructure. Generally, the metallic deckhouses, containers and other superstructures may produce bright lines along the range or azimuth direction, due to the side-lobe effect. In this paper, a side-lobe reduction method in the image domain is applied [
21].
MER is a signature dimension box containing a vessel and is defined as the smallest rectangle that contains major pixels of a vessel. In this paper, all feature extractions are based on the MER. So, the MER is directly related to the accuracy of the recognition of merchant ships.
The bearing of the vessel or orientation angle
α ρelative to the vertical or azimuth direction (which is north in each SAR image) is estimated via the order moment as suggested in [
21]:
μpq is defined by Equation (3).
where
f(
x,y) is the pixel value at (
x,y).
is the centroid of a chip and is defined as
,
mpq is the (
p+
q) order moment and is defined as
mpq = ∑∑
xpypf(
x,
y).
B is the π/2 mbiguity of the orientation. When
μ20 >
μ02,
B = 1; otherwise
B = 0
With the orientation angle and centroid, the vessel chips are rotated in vertical direction to ease the application of the MER. Features can also be more easily to be extracted. The MER extraction is based on the binary segmentation image of a vessel (
Figure 5).
After data calibration, the values of the backscatter coefficient of pixels can be analyzed quantitatively and can be compared image to image. Based on the analysis of the pixel value of the vessels in COSMO-SkyMed SAR images, an empirical threshold of 2 dB is set to segment the vessels in the chip image. If the pixel value is larger than 2 dB, then it will be labeled as 1; otherwise it will be labeled as 0. After the segmentation, a morphological operation is applied to remove small isolated pixels. Thus, the strong backscattering pixel set of the vessel in a chip is obtained, assuming the segment image is A(i, j). Algorithm 1 shows the procedure for the extraction of the left and right boundaries of the MER in the pixel set. Similarly, the top and bottom boundaries can be estimated using 1≤ i ≤ M. Because the top and bottom boundaries are short, the empirical threshold T is set to 3.
| Algorithm 1 finding left and right boundaries of MER |
Input: histogram of the segmentation chip. 1 ≤ j ≤ N.
Output: left and right boundaries of MER.
set the threshold T = 7
for j = 1 to N, do
Tl = Hcol(j + 1) − Hcol (j)
if Tl≥ T then stop loop
b1 = j, and b1 is left boundary.
end if
else
j = j + 1. continue the loop
end
end for
for j = N to 1, do
Tr = Hcol (N − j) − Hcol (N − j − 1)
if Tr≥ T then stop loop.
br = j, and br is the right boundary
end if
else
j = j − 1. continue the loop
end
end for |
Figure 5.
MER extraction of a vessel
Figure 5.
MER extraction of a vessel
4.2. Feature Set for Classification
After pre-processing the binary pixel extraction, the removal of the side-lobe effect and the MER extraction, the vessel chips are ready for structural feature analysis. We investigate features to describe the structure of a vessel in high-resolution SAR images.
4.2.1. Average Value of Kernel Density Estimation
The kernel density estimation (KDE) is one of the nonparametric density estimation methods in the field of point pattern analysis and is an important data analysis tool for determining the structure and distribution of a point dataset. The KDE function allows one to estimate the intensity of a point pattern and to represent it by means of a smoothed three-dimensional continuous surface that represents the variation of density of point events across the study region
R [
25]. In an image, pixels can be regarded as points. Thus, the KDE can indicate the density of the selected pixel with the relationship between a pixel and its neighbors.
The general form of a kernel estimator is [
25]:
where
f(
P) is the estimate of the density of the spatial point pattern measured at location
P,
Pi is the observed
ith point,
k( ) represents the kernel weighting function and
τ is the bandwidth. The value of
τ is chosen to provide the required degree of smoothing in the estimate (
Figure 6).
Kernel estimation is a generalization of this concept, in which the window is replaced with a moving three-dimensional function (the kernel) that weights events or points within its sphere of influence according to their distance from the point at which the intensity is being estimated. The method is commonly used in a more general statistical context to obtain smooth estimates of univariate (or multivariate) probability densities from an observed sample of observations ([
26,
27]).
Figure 6.
Kernel estimation of a point pattern (re-edited from [
26])
Figure 6.
Kernel estimation of a point pattern (re-edited from [
26])
In our method, a typical kernel called a quartic kernel is chosen. Thus, the estimate of the density distribution
f(
P) is expressed as Equation (5) [
26].
where
di is the distance between pixel
P(
x,
y) and the other pixels belonging to the same vessel, and the summation only occurs over values of
di that do not exceed
τ. The region of influence within which the observed points contribute to
f(
P) is a the circle of radius
τ centered on
P(
x,
y). Analysis of the KDE is based on vessel pixels in the MER. After segmentation, a binary image is obtained. In the binary image, only the strong pixels (labeled “1”) are preserved. Those pixels can be regarded as the points in
Figure 6. Using Equation (5), we can obtain the KDE value of each pixel.
Figure 7.
Kernel density estimation of the three types of ships
Figure 7.
Kernel density estimation of the three types of ships
Figure 7 shows examples of the performance of the KDE. The first column is the bulk carrier. The second column is the container ship, and the third column is the oil tanker. Container ships have a high density. Usually, a container ship is completely loaded with containers, so it has the largest number of large dihedral and trihedral reflectors; stronger scattering can be found in the image. Bulk carriers and oil tankers also have many dihedral and trihedral reflectors, but they are small and might not add up to a strong signal. The metallic deckhouses are the major strong scatterers. The other facilities, such as pipelines and cranes, spread separately. Therefore, bulk carriers and oil tankers have a relatively low KDE value. To form the feature vector, the average value of the KDE is calculated by Equation (6), in which
n denotes the number of vessel pixels.
4.2.2. Features Based on Structural Descriptions
Three features, including the left-right ratio, the ratio of the maximum and middle axes, and the ratio of the maximum and minimum axes, are used to describe the structure of the vessels.
The longest axes (LA) of the vessel in the image, which has the maximum cumulative value along the direction of the ship’s hull or along the vertical direction after the vessel rotation in the preprocessing, is the longest line segment of a ship. A vessel binary image inside the MER, which is rotated and segmented in the processing phase, is
B(
i,
j). Then, the histogram, which is populated by the number of non-zero pixels along the vertical direction in the MER, can be given as:
The column number J, J = argmax h(j) , is the location of the LA. BM is the length of the MER, and BN is the width of the MER.
Figure 8 provides examples of the three types of vessels. The first column shows examples of the original vessel chips of the three ship categories: a bulk carrier, a container ship, and an oil tanker from top to bottom. The second column is the ship chips after the image rotation and segmentation. The green rectangles and red lines are the MERs and LAs of the ships, respectively. The corresponding histograms (
h(
j)) along the vertical direction are shown in the third column, where some parameters of the features are also shown in the graph. In
Figure 8c,f,i, the horizontal axis denotes the width of the ship. The y-axis denotes
h(
j), the number of non-zero pixels of the segmented ship in the SAR image within the MER along the vertical,
i.e., parallel to the left or right MER border.
hmax and
hmin are maximum and minimum values of
h(
j).
hmax gives the LA.
hc is
h(
j) at center of the width.
D1 and
D2 are the two breadths divided by the LA. Therefore, the three features can be defined as follows.
Figure 8.
Structural features. A and R are the azimuth and range directions, respectively. (a) original SAR image of a bulk carrier, (b) vessel chip after rotation and segmentation, (c) illustration of structural features, (d) original SAR image of a container ship, (e) vessel chip after rotation and segmentation, (f) illustration of structural features, (g) original SAR image of a oil tanker, (h) vessel chip after rotation and segmentation, and (i) illustration of structural features. The incidence angles of (a), (d), and (g) are approximately 50.32°, 59.49°, 50.22°, respectively.
Figure 8.
Structural features. A and R are the azimuth and range directions, respectively. (a) original SAR image of a bulk carrier, (b) vessel chip after rotation and segmentation, (c) illustration of structural features, (d) original SAR image of a container ship, (e) vessel chip after rotation and segmentation, (f) illustration of structural features, (g) original SAR image of a oil tanker, (h) vessel chip after rotation and segmentation, and (i) illustration of structural features. The incidence angles of (a), (d), and (g) are approximately 50.32°, 59.49°, 50.22°, respectively.
Left-Right Ratio (R1)
For bulk carriers, the LA is usually the ship side facing the radar’s incident wave. The LA is one of the two sides of the ship’s hull. For container ships, the LA is often located around the middle axis. For oil tankers, the main axis is usually the pipeline and the symmetric line. So, the LA is generally also in the center of the ship’s deck. The location of the LA can be characterized by the left-right ratio, which can be defined by Equation (8). To avoid the influence of the boundary, the boundary pixels are not considered when the parameter is calculated.
where
D1 and
D2 are the distances from the maximum axis to both sides of the MER. According to the definition, container ships and oil tankers usually have a relatively smaller
R1, which is often close to 1, while bulk carriers usually have a larger
R1.
Ratio of Maximum and Middle Axes (R2)
Assume that the cumulative value along the ship length is h(j), where1< j < BN. R2 is defined by Equation (9). To avoid the influence of the boundary, the boundary pixels are not considered when the parameter is calculated.
where
hmax is the maximum value of the histogram, as indicated by the longest blue line in
Figure 8c,f,i.
hc denotes the number of positive pixels mid-axis,
i.e., at the center of the MER. This parameter allows distinguishing between symmetrical and asymmetrical ship signatures; hence, it is another way to discriminate between container ships, oil tankers and bulk carriers.
Ratio of the Maximum and Minimum Axes (R3)
R3 is defined by Euation (10), where
hmax is the same as mentioned above.
hmin is the minimum value of the histogram
h(
j). In
Figure 8c,f,i, the shortest blue line indicates
hmin. To avoid the influence of the boundary, the boundary pixels are not considered when the parameter is calculated.
Based on an analysis of
Section 3 and
Figure 8, the parameter
R3 of a container ship is expected to be small and close to 1, and the
R3 of the bulk carrier is expected to be larger than that of the oil tanker.
4.2.3. Mean Backscattering Coefficient (M)
The mean value is calculated based on the ship pixels after calibration in the range of the MER (Equation (11)). The pixel values of the ship are converted to sigma value
σij after the calibration. Pixels with
σij > 2dB are selected for statistics to avoid the effect of the background. Thus, the ship’s mean backscattering coefficient is
M is expected to be largest for a container ship, because there are more strong scatterers on the deck. While bulk carrier and oil tanker have lower mean values.
4.2.4. Local Radar Cross Section Density (RCS)
The local RCS density is a typical scattering feature for describing the electromagnetic scattering characteristic of a target in a SAR image [
3,
17]. For classification, a ship is divided into several parts (usually the bow, middle and stern sections). The local radar cross-section density is the mean RCS value retrieved for the three parts of the ship signature (
RCS1, RCS2, RCS3), which are normalized by the maximum value (Equation (12)).
where
Mi and
Ci are the total intensity and area of part
I, respectively. The local physical structures of different types of ships are distinct due to their functionality. Therefore, the backscattering intensities will differ for the local physical structures of different types of ships.
4.2.5. The Ratio of the Width and Length (RWL)
The ratio of the width and length is usually applied to describe geometric features of a ship [
17]. In the paper, the RWL is used for comparing other features.
4.3. Classifier
Support vector machine (SVM) is a supervised learning model with associated learning algorithms that analyze data and recognize patterns on the basis of the structural risk minimization principle in statistics. SVMs have been used for object classification and recognition in high-resolution SAR images [
15,
17]. A large number of experiments have shown that, compared with traditional neural networks, a SVM has a simpler structure, and better performance, particularly regarding its generalization ability. In addition, SVMs are very useful for solving problems with small sample sets and large dimension. Specifically, the model used in this paper is the C-support vector classification (C-SVC), which was proposed by Boser
et al. and was realized by Chih-Chung Chang and Chih-Jen Lin [
28].
6. Conclusions
Vessel classification in high-resolution SAR images is highly significant for maritime traffic management and surveillance. In this work, we focus on feature selection and classification of vessels in high-resolution SAR images, present an improved processing procedure and propose feature combinations for vessel classification. In an image, the kernel density estimation can indicate the pixel density and relationship between a pixel and its neighbors. Combined with the mean backscattering coefficient, the feature vector {K, M} (average value of the kernel density estimation and mean backscattering coefficient) has a promising ability to distinguish bulk carriers, container ships and oil tankers. The left-right ratio (R1), the ratio of the maximum and middle axes (R2), and the ratio of the maximum and minimum axes (R3) are three indexes for describing structural features of a vessel. The analysis results show these indexes are better than the local radar cross-section density for vessel classification in high-resolution SAR images. When features R1, R2 and R3 are added to the feature vector {K, M}, the classification results can be slightly improved. The support vector machine is adopted as the classifier. Methods are introduced for the model and parameter selection of the classifier. Before the classification, data normalization is performed with values of every feature to avoid attributes with greater numeric ranges dominating those in smaller numeric ranges. Moreover, the radial basis function is selected as the kernel function for the SVM. The best parameters of the radial basis function are estimated by a “grid search” method for cross validation. The aim of the process is to achieve satisfactory classification results. Lastly, based on feature analysis, the feature vector {K, R1, R2, R3, M} s selected for the classification. The K-nearest neighbor algorithm and minimum distance classifier methods are compared with the proposed method. The results show that the proposed method can obtain better results than the other two methods for classifying the three categories of vessels with 3 m resolution Cosmo-SkyMed stripmap HIMAGE images. The positive classification rates of the algorithm reach 97.6%, 76.3% and 85.9% for the bulk carrier, container ship and oil tanker, respectively. However, because of the “grid search” method for reasonable parameters of the kernel function, the proposed method requires more time than the other two methods.
Although the preliminary results are encouraging, more tests are necessary to improve the classification method. In this paper, only shallow incidence angle, X-band, 3 m resolution SAR images were considered. For steep incidence angles, the method should be adjusted due to the change in the vessel characteristics in the image. As we know, fast ships moving along the azimuth direction are usually strongly blurred and completely out of focused in a SAR image. Even moored ships in high sea states may be blurred due to the radial acceleration generated by sea-wave motion. In these cases, the vessel structures are not clear enough for classification by the method proposed in the paper. Features of travelling ships in the SAR image will be considered in future research. The research area was the open sea. If vessels are anchored in the harbor, a new segmentation method could be developed to isolate the ship signature from quay. To improve the robustness of the method (for example, the threshold in the MER extraction), more images should be obtained for analysis and testing. In addition, the relationship between the physical structures of a vessel and the features in the image under different imaging conditions will be comprehensively investigated.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















