
Abstract
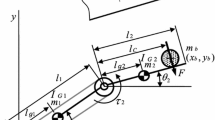
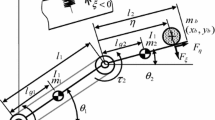
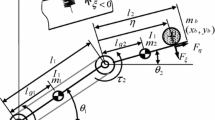
In this article, equations of motion of a manipulator, whose mechanism has a tray installed with a passive revolute joint, are derived after consideration of the characteristics of the driving source. Considering the relative motion between the tray and the object, the trajectories of the velocity for saving energy are calculated by iterative dynamic programming. Also, the dynamic characteristics of manipulator control based on the trajectory for saving energy are analyzed theoretically and investigated experimentally.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.References
Arisumi H, Yokoi K, Kotoku T, et al (2002) Casting manipulation (experiments on swing and gripper throwing control). Int J JSME 45(1 C):267–274
Shiroma N, Lynch KM, Arai H, et al (2000) Motion planning for a three-axis planar manipulator with a passive revolute joint (in Japanese). J JSME 66(642):545–552
Sato A, Sato O, Takahashi N, et al (2006) Trajectory for saving energy of a direct-drive manipulator in throwing motion. Artif Life Robotics 11:61–66
Sato A, Sato O, Takahashi N, et al (2008) A study of manipulator with passive revolute joint. Artif Life Robotics 13:31–35
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was presented in part at the 15th International Symposium on Artificial Life and Robotics, Oita, Japan, February 4–6, 2010
About this article
Cite this article
Sato, O., Sato, A., Takahashi, N. et al. Analysis of a manipulator in consideration of the relative motion between a tray and an object. Artif Life Robotics 15, 151–155 (2010). https://doi.org/10.1007/s10015-010-0785-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-010-0785-8