
Abstract
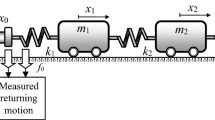
A wave absorption control strategy is proposed to suppress vibration at the distal end of a flexible robotic arm while achieving accurate position control. It assumes the flexible arm with an actuator at one end and a load at the other, and interprets the arm’s dynamics with a lumped model in terms of mechanical waves entering and leaving the arm at the actuator-arm interface. Control input to the actuator is thus resolved into two superposed waves, which the actuator launches and absorbs simultaneously. From the motion start-up, the launch wave is assigned to the actuator, to which the absorbing wave is added subsequently. The absorbing wave is computed with the delayed tip motion. It absorbs the vibratory energy within the arm, and prevents the wave returning from the arm tip from entering the control system again. The properties of the control scheme proposed are studied throughout. It works very well under uncertainty, and is stable and robust, for tip positioning and trajectory tracking control, as demonstrated in the numerical results.
Access this chapter
Tax calculation will be finalised at checkout
Purchases are for personal use only
Similar content being viewed by others

References
Robinett III, R.D., Feddema, J., Eisler, G.R., Dohrmann, C., Parker, G.G., Wilson, D.G., Stokes, D.: Flexible Robot Dynamics and Controls. Kluwer Academic/Plenum Publishers, New York (2002)
Junkins, J.L., Kim, Y.: Introduction to Dynamics and Control of Flexible Structures. AIAA Education Series, Washington, DC (1993)
O’Connor, W.J.: Wave-based analysis and control of lumped-modeled flexible robots. IEEE Trans. Robot. 23(2), 342–352 (2007)
Feliu, J.F., Feliu, V., Cerrada, C.: Load adaptive control of a single-link flexible arm based on a new modelling technique. IEEE Trans. Robot. Autom. 15(5), 793–811 (1999)
Zhu, G., Ge, S.S., Lee, T.H.: Simulation studies of tip tracking control of a single-link flexible robot based on a lumped model. Robotica 17(1), 71–78 (1999)
Banerjee, A.K., Singhose, W.E.: Command shaping in tracking control of a two-link flexible robot. J. Guid. Control Dyn. 21(6), 1012–1015 (1998)
Siciliano, B., Book, W.J.: A singular perturbation approach to control of lightweight flexible manipulators. Int. J. Robot. Res. 7(4), 79–90 (1988)
Dadfarnia, M., Jalili, N., Xian, B., Dawson, D.M.: A Lyapunov-based piezoelectric controller for flexible Cartesian robot manipulators. ASME J. Dyn. Syst. Meas. Control 126(2), 347–358 (2004)
Caswara, F.M., Unbehauen, H.: A neurofuzzy approach to the control of a flexible-link manipulator. IEEE Trans. Robot. Autom. 18(6), 932–944 (2002)
Wang, F.Y., Russell, J.L.: Optimum shape construction of flexible manipulator with total weight constraint. IEEE Trans. Syst. Man Cybern. 25(4), 605–614 (1995)
Yang, T.W., Xu, W.L., Han, J.D.: Dynamic compensation control of flexible macro-micro manipulator systems. IEEE Trans. Control Syst. Technol. 18(1), 143–151 (2010)
Lambeck, S., Sawodny, O.: Trajectory generation and oscillation damping control for a flexible link robot. In: Proceedings of IECON, Taipei, pp. 2748–2753 (2007)
Singhose, W., Vaughan, J.: Reducing vibration by digital filtering and input shaping. IEEE Trans. Control Syst. Technol. 19(6), 1410–1420 (2011)
Von Flotow, A.: Traveling wave control for large spacecraft structures. J. Guid. Control Dyn. 9(4), 462–468 (1986)
Mei, C., Mace, B.R.: Wave reflection and transmission in Timoshenko beams and wave analysis of Timoshenko beam structures. ASME J. Vibrat. Acoust. 127(4), 282–394 (2005)
Matsuda, K., Kanemitsu, Y., Kijimoto, S.: A wave-based controller design for general flexible structures. J. Sound Vibrat. 216(2), 269–279 (1998)
Halevi, Y.: Control of flexible structures governed by the wave equation using infinite dimensional transfer functions. ASME J. Dyn. Syst., Meas. Control 127(4), 579–588 (2005)
Sawada, Y., Ohsumi, A., Ono, A.: Wave control of a class of flexible beams by an idea of imaginary beam. In: Proceedings of CDC, Kobe, Japan, pp. 4228–4233 (1996)
Saigo, M., Tani, K., Usui, H.: Vibration control of a travelling suspended system using absorbing wave control. ASME J. Vibrat. Acoust. 125(3), 343–350 (2003)
Filipovic, D., Schroeder, D.: Control of vibrations in multi-mass systems with locally controlled absorber. Automatica 37(2), 213–220 (2001)
O’Connor, W.J., McKeown, D.J.: Time-optimal control of flexible robots made robust through wave-based feedback. ASME J. Dyn. Syst. Meas. Control 133(1), 011006:1–6 (2011)
Becedas, J., Trapero, J.R., Feliu, V., Sira-Ramirez, H.: Adaptive controller for single-link flexible manipulators based on algebraic identification and generalized proportional integral control. IEEE Trans. Syst. Man Cybern. B Cybern. 39(3), 735–751 (2009)
Yang, T.W.: Vibration suppression and error compensation control for flexible space manipulators - sensing, control and experiments. Ph.D. dissertation, Mechanical Engineering, SEU, Nanjing, China (2001)
Yang, T.W., O’Connor, W.J.: Wave theory applied to vibration control of elastic robot arms. In: Proceedings of IASTED-MIC, Innsbruck, Austria, pp. 260–265 (2005)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Yang, T., Qin, Y., Han, J. (2017). Vibration Control of a Flexible Robotic Arm by Wave Absorption Based on a Lumped Dynamic Model. In: Sun, F., Liu, H., Hu, D. (eds) Cognitive Systems and Signal Processing. ICCSIP 2016. Communications in Computer and Information Science, vol 710. Springer, Singapore. https://doi.org/10.1007/978-981-10-5230-9_42
Download citation
DOI: https://doi.org/10.1007/978-981-10-5230-9_42
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-5229-3
Online ISBN: 978-981-10-5230-9
eBook Packages: Computer ScienceComputer Science (R0)